




Описание
Описание продукта:
Хт-10 Lidar-это новое лазерное решение для беспилотных летательных аппаратов, подметальных роботов и промышленных роботов. Продукт основан на принципу тоф ранжирования и имеет преимущества небольшого размера, низкой стоимости, отличной производительности, и сильной стойкости к помехам окружающей среды светильник. Он может быть использован в качестве заменителя обновлений в связанных областях. Этот продукт основан на информации о расстоянии последовательной связи. Он прост в использовании, гибкий в установке и легко расширяется.
Основные параметры:
В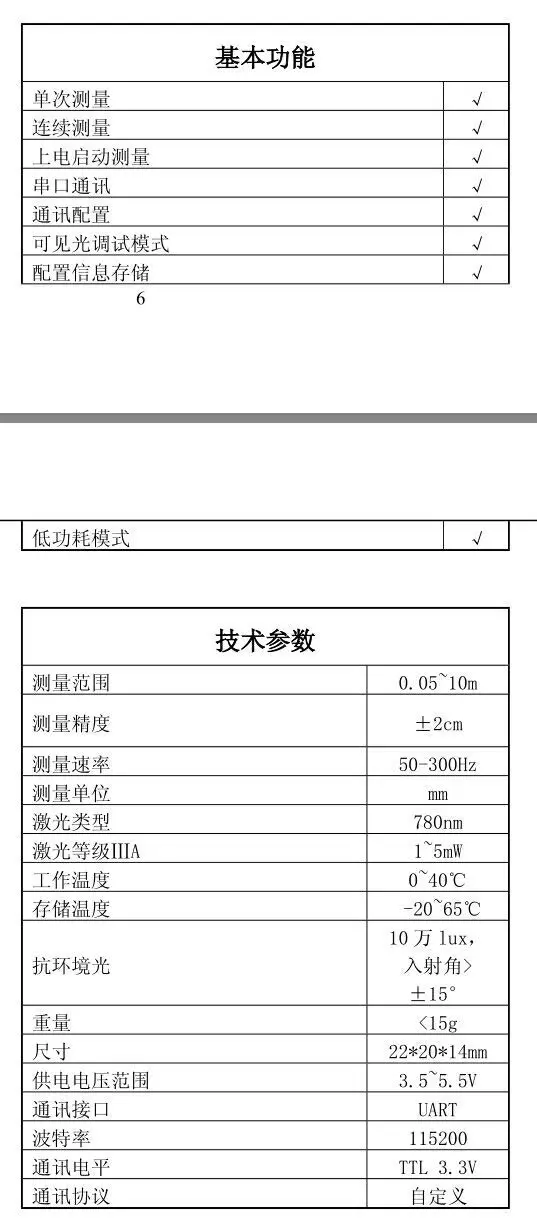
ВРадар соединение
1. Сделайте соединительный кабель в соответствии с определением порта
2. Вставьте кабель в 4-контактный порт радара

Измерение
После включения радара, он будет непрерывно отправлять данные о расстоянии между радаром и целью через последовательный порт.
Данные о расстоянии цели могут быть запрограммированы согласно нашему протоколу связи.
Протокол
1. Этот протокол является последовательной связью, скорость передачи составляет 115200, без тестирования, 8 бит данных, 1 стоп
Stop
2. Кадры данных протокола передаются в ASCII коде и интерпретируются в шестигранном формате
3, лидер рамки протокола ~
4, конец идентификатора рамки протокола \ r \ n
5. Протокол по умолчанию соответствует режиму измерения включения. После включения CHT-10 автоматически отправляется на целевой объект.
Расстояние между
Протокол определение каркаса:

Применение примеров:
Последовательный порт получает символ в виде кода ASCII: ~ 01030100019AC5CD
Соответствующее решение:
~: Начальный символ кадра данных
01: адрес датчика (шестигранный)
03, регистр состояния (шестигранный)
0100, адрес параметра (шестигранный, данные)
019A, значение параметра (шестиугольная, расстояние в реальном времени, данные в миллиметрах), означает, что фактическое расстояние составляет 410 миллиметров или 0,41 метров.
C5CD, контрольная сумма (CRC16, низкий байт первый, высокий байт второй)
Тесты интерфейс
Диагностическое программное обеспечение
После того, как модуль правильно подключен, рабочий статус радара может наблюдаться через верхнее программное обеспечение тестирования компьютера независимо разработанное нашей компанией.
1, установка программного обеспечения для отладки

Имя пользователя по умолчанию для пользователя, а пароль пользователя по умолчанию для 1234. После ввода 1234 в поле ввода паролей нажмите кнопку входа для входа в основной интерфейс

2. Ознакомление с основным интерфейсом

После ввода основного интерфейса сначала выберите соответствующий последовательный порт на компьютере через выпадающий список на последовательном порту. Скорость передачи данных лазерного радара по умолчанию составляет 115200 без настройки. После выбора последовательного порта, если последовательный порт существует, он автоматически откроет последовательный порт, не нажимая кнопку «открыть последовательный порт». После открытия последовательного порта расстояние между лазерным радаром и целевым объектом обновляется в режиме реального времени на оси координат Y, и кривая изменения расстояния отображается в режиме реального времени в области графического отображения.

3, данные о расстоянии хранения данных могут быть сохранены в txt файл для анализа экспорта. Нажмите «файл»-> «сохранить данные ..»-> выбранныйВыберите место сохранения файла и имя файла xxx.txt> "Ок" для завершения спецификации файла. После завершения теста можно просматривать данные о расстоянии в течение определенного периода времени, просматривая файл.

Условия измерения
Для различных целей измерения и условий измерения, из-за чрезмерной интенсивности окружающей среды светильник, высокой температуры окружающей среды, или
Если человек слишком низок, мишень слишком слаба или слишком отражающая, или поверхность мишени шероховатая, это может привести к испытанию
Укоротить процесс или произвести большие ошибки в результате измерений.
Характеристики
- Бренд
- Fly thinking Dili Asia
Комплементарные товары









